«Оптические нервы» дадут роботам чувство осязания
В данный момент большинство роботизированных механизмов обладают лишь регуляцией силы нажатия, но благодаря исследователям из Корнелльского университета, работающих в Organic Robotics Lab, роботы в будущем сумеют получить чувство осязания, ранее доступное лишь живым организмам. Благодаря этому руки роботов могут обрести «мягкость прикосновений». Такая технология основана на внедрении в ткани покрытия роботов особых сверхчувствительных датчиков.
Сами датчики состоят из светодиодов и фотосенсоров, встроенных в гибкие трубки (по строению «в разрезе» все это очень похоже на нервное волокно). Множество таких трубок, связанных с центральным процессором машины, формируют оптическую «нервную систему», работа которой способна обеспечить высокоточную осязательную обратную связь. Особым строением обладает и покрытие руки, основанное на способе, называемом «мягкая литография». Работа же оптического сенсора основана на анизотропии: это изменение коэффициента отражения света на границе прозрачного ядра волновода и его оболочки при растяжении или изгибе волновода. При этом изменение распределения и интенсивности светового потока позволяет не только определить величину деформации, но и ее направление с достаточно высокой точностью. По заверениям создателей,
«Автоматизированная рука изготовлена из нескольких типов силикона и полиуретана, наряду с небольшим количеством различных типов гидрогелей. Сама кисть в своей основе имеет конструкцию, изготовленную при помощи трехмерной печати, и приводится в действие пневматическими приводами. В каждый из пальцев включено по три оптических датчика. Различие в положении этих датчиков позволяет путем комбинации результатов измерений вычислить изменения сил давления и обеспечить осязательную обратную связь очень высокого качества».
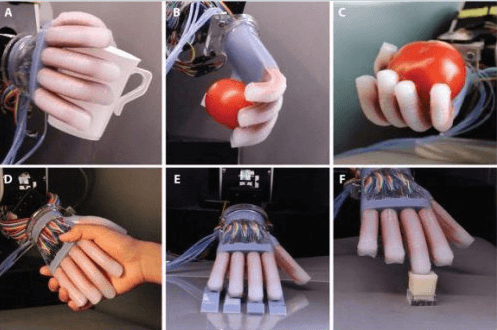
Роботизированная рука нового типа
Самое интересное, что особый алгоритм обработки данных способен восстановить трехмерную форму объекта, который рука держит в данный момент. Все эти технологии могут быть использованы не только в робототехнике, но и при изготовлении высокоточных протезов нового типа. Тестовые образцы таких рук уже сумели на ощупь определить степень зрелости фрукта и достаточно точно регулировать давление, оказываемое на предметы.